Quicksilver – 2003
Game robot was designed for: Stack Attack
Brief Description of the game: The object of the game is for each of the alliances to score points by acquiring and stacking plastic storage containers in their own end of the playing field. Additional points are awarded to alliances whose robots are positioned on the platform at the end of each match. For further information visit http://www.usfirst.org/
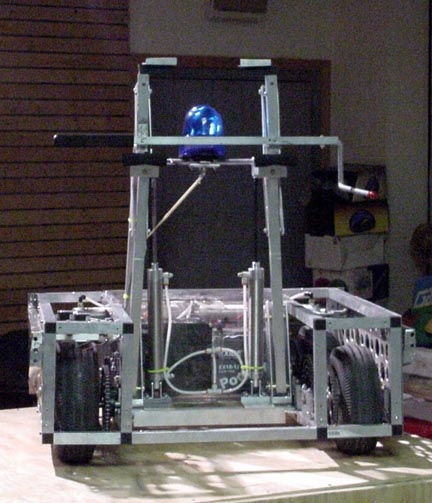
Frame: Tubular Aluminum
Drive System: 4′ 9″ pneumatic wheels controlled by chain and sprocket, powered by two CIM motors.
Manipulator: Pneumatic arm designed parallel to the ground, used to stack and orient Sterilite bins.
2003, Team Mercury’s rookie build season, was full of learning and experimentation. Through work with mentors and students from Raider Robotix, 1089 designed their first robot ever. It was made from tubular aluminum, and weighed in at 129.8 lbs, just two-tenths of a pound underweight! We used a familiar chain and sprocket system to run our powerful drive train.
The team also developed an arm mechanism with rubber grips to both flip and stack Sterilite bins during two-minute rounds. Though the arm, an engineering feat for our rookie team, was barely used in competition, we were more than satisfied with our accomplishments. The pride of Quicksilver was its “wings of death,” which were powered by pneumatic pistons, and were used to play both defense and knock over a central wall structure in the 2003 game. The robot was robust and hardly needed repairs, save for a few bumps and bruises. With it, the team reached semi-finals of the Johnson & Johnson Mid-Atlantic (now New Jersey) Regional.